Release Notes v4.7
Release Date | 2021/11/09 15:00 PM (GMT +9) |
Simulator | MORAI SIM Standard |
Version | v4.7.211109.1 |
Release
R _ 2021.11.09 _ v4.7.211109.1
Updates
Apollo r6.0 Bridge Update
Network UI
Network Settings의 Simulator Network 탭 상 통신 방식 표현 UI를 Dropdown에서 Toggle형식으로 변경.
NpcGhostMode UI NPC Ghost Mode 사용 방법
PlayMode > Ghost > NPC Ghost Mode의 Setting 창 UI 변경
Ego Ghost Mode Ego Ghost Mode 사용 방법
UDP Ego Ghost Ctrl Cmd 기능 추가.
ROS Ego Ghost Ctrl Cmd 기능 수정.
Heading에서 Rotation으로 확장.
Rotation, Velocity, Steering Angle ROS message 추가 반영.
WorkSpace를 이용한 UI Option 저장 기능 기타 시뮬레이터 기능
UI창을 시뮬레이터에 띄우고 View > Workspace > Save Workspace를 통해 UI Option 저장 가능.
IMU 오차 추가
IMU 부착 위치에 따른 오차 추가.
Shaded Area ■ 장애물 배치 및 시나리오 관리 | Shaded Area
Edit > Scenario > Map Edit Mode의 Shaded Area 설정 가능한 센서 추가.
IMU
2D/3D LiDAR
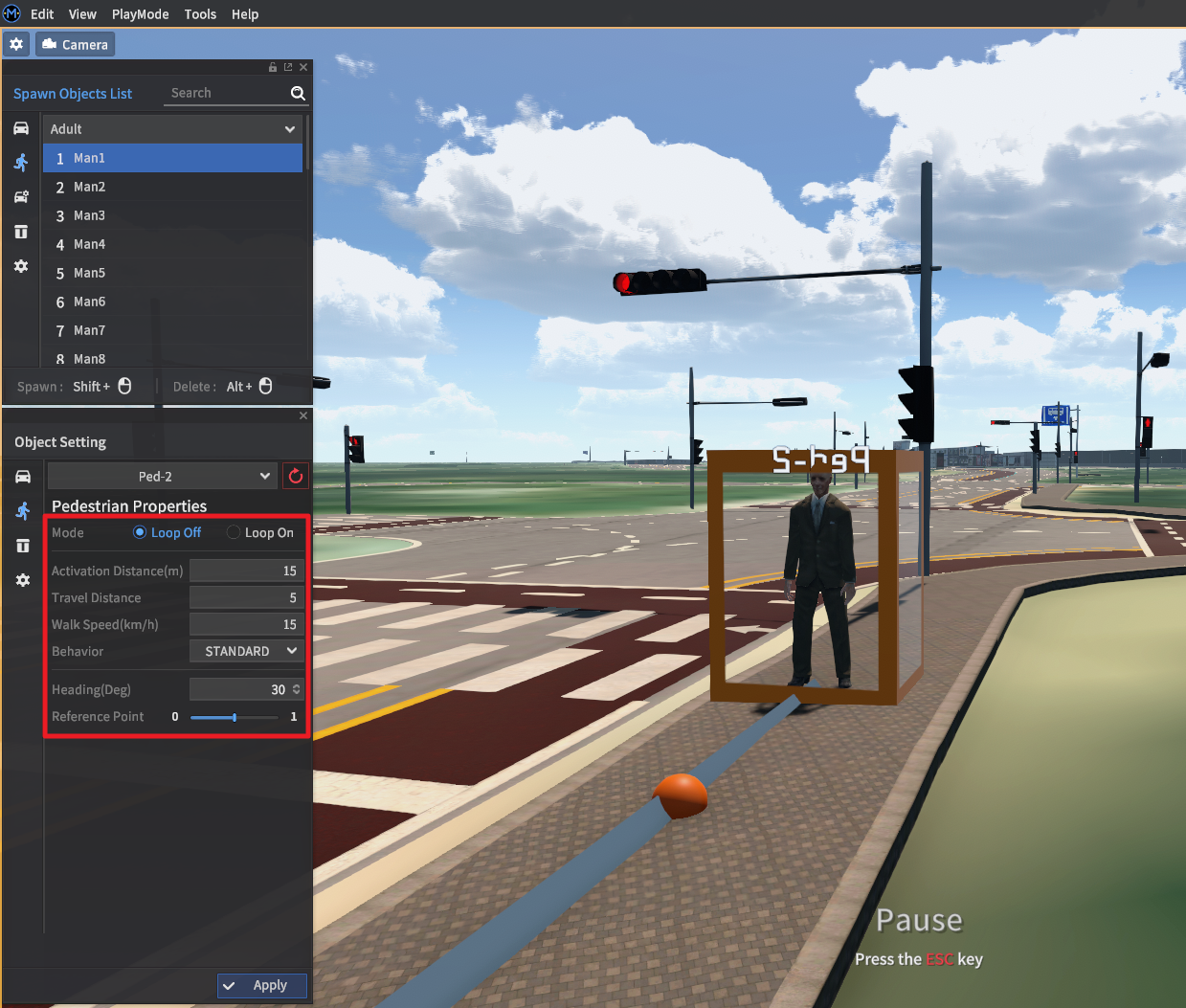
보행자 업데이트 ■ 장애물 배치 및 시나리오 관리 | Single Pedestrian
Edit > Scenario >Scenario Edit Mode > Spawn Objects List > Pedestrian Properties의 Behavior에서
Standard, Calling, Texting 선택 가능 .
Obstacle 크기 조절 기능 ■ 장애물 배치 및 시나리오 관리 | Object 배치
Edit > Scenario >Scenario Edit Mode > Spawn Objects List의 Obstacle을 Spawn 후
Scale(가로, 세로, 높이) 설정을 통해 크기 조절하는 기능.
Clipping Distance 조절 기능 ■ 기타 시뮬레이터 기능 | Camera Look At Controller
Simulator Camera(View 메뉴 아래) > Camera Setting Clipping Dist. Scroll 조절을 통해 시뮬레이터 카메라 가시거리 조절 가능.
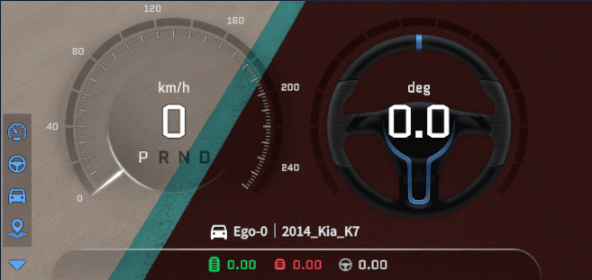
Steering 핸들 시각화 기능 ■ 기타 시뮬레이터 기능 | Show Vehicle Cluster and Map Info
Viewport Setting > Show Vehicle Cluster and Map Info > Wheel 선택 시 Steering 제어에 따라 핸들 돌어가는 정도 시각화 가능.
거리 측정 기능 ■ 기타 시뮬레이터 기능 | 거리 측정 기능
MORAI SIM 상에서 마우스로 클릭하는 위치 사이의 거리를 측정 할 수 있는 기능.
Left Ctrl + Left Alt + Mouse Left Click 키 입력으로 시작점과 끝점을 지정하여 거리 측정함.
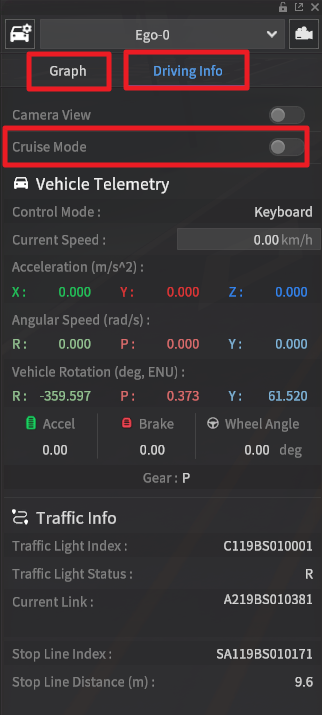
Viz Path 기능
Ego Vehicle의 Cruise Mode 사용 시 이동 경로를 보여주는 Viz Path 기능.
Custom Map Material 제공 Scene 생성 방법
Extra Bundle을 통해 생성된 맵 라인에 직접 원하는 머테리얼을 적용 시킬 수 있는 기능.
OpenDRIVE & OpenSCENARIO 지원 OpenSCENARIO Support Demo Ver. Main
OpenDRIVE를 통해 Custom Map 추가하고 OpenSCENARIO를 이용하여 시나리오 실행함.
OpenDRIVE & OpenSCENARIO Support 페이지 추가.
Map Update
R_KR_PG_K-City & R_KR_PG_KATRI
신호 타이밍을 실제 시설 타이밍과 같도록 신호등 변경.
R_KR_PR_SejongBRT0
BRT 노선 전 구역 도로 및 차선 구현.
R_KR_PR_Sangam
건물 텍스쳐 업데이트.
R_KR_PG_KIAPI
터레인 최적화 및 도로 매쉬 개선.
V_RHT_Suburb_02
가상 건물 추가.
V_RHT_Suburb_03
신규 구현
V_RHT_Suburb_02와 지도 구성은 같으나 모든 도로를 2차선 또는 3차선으로 확장.
대구 테크노 폴리스
기존 지도 대비 도로 매쉬 및 신호등 동작하는 사거리의 범위를 확장.
Bug Fixes
2020_Kia_Stinger NPC 차량 주행 이상 개선.
Launcher 다운로드 속도 개선.
Sensor Camera View 이미지 비율 개선.
1:1로만 설정 가능한 Sensor Camera View 이미지 비율을 Width, Height 입력을 통해 비율 조절 가능.
Hot Fix
H1 _ 2021.11.16 _ v4.7.211109.H1
Vehicle Cluster and Map Info 내 세부적인 항목 선택할 수 있는 UI 추가
Viewport Setting > Show Vehicle Cluster and Map Info의 Dashboard, Wheel, Map, Ego Vehicle 정보 관련하여 화면 출력 여부 선택 가능한 UI 추가.
Vehicle Cluster and Map Info
NPC 차량 주행 이슈 개선
정지선 대기, 코너링 주행, 본선차로로의 합류 주행 이슈 개선.
3D LiDAR Noise 입력 버그 수정
Noise 입력값(Mean) 반영되지 않았던 점 개선.
Scenario Load 시 발생하는 버그 수정
Scenario Load 시 발생하는 Sur-Vehicle, Pedestrian, Object 이슈 개선.
H2 _ 2021.11.23 _ v4.7.211109.H2
Physical Camera Parameter 이름 변경
파라미터 중 Lens Shift를 Sensor Shift로 이름 변경.
3D LiDAR Gaussian Noise Filter 수정
Mean(m) 의 Range 0 ~ 1 에서 -1 ~ 1로 수정.
0.5 이상의 Mean 값이 반영되지 않는 버그 개선.
Velodyne 3D LiDAR의 UDP 패킷 중 Factory Byte 값 수정
MORAI SIM에서 전송하는 Velodyne 3D LiDAR의 UDP 패킷 중 Factory Byte의 값이 오입력되어 값 수정.
Rendering Quality에서 Low 설정 시 발생하는 차량 등(Light) 동작 버그 개선
Option > Graphics > Rendering Quality를 Low 설정 시 발생하는 ‘방향지시등, 브레이크등, 후진등 작동 이상’ 개선.
Rubber Cone/Color Cone의 물리현상이 나타나지 않는 버그 개선
차량 충돌 시 Obstacle인 Rubber Cone과 Color Cone이 움직이지 않는 버그 개선.
Pedestrian의 Behavior 기능 버그 개선
Pedestrian > Boy의 Behavior 중 Texting 기능이 동작하지 않는 버그 개선
Pedestrian의 Behavior 중 Standard가 없는 버그 개선.
Sur-Vehicle의 Closed Loop 활성화 시, Pause mode를 종료 후 Sur-Vehicle이 튀어오르는 버그 개선
Scenario Edit으로 임의의 Sur-Vehicle 목적지 설정 후 Close Loop 활성화 시, Pause Mode 종료 후 Sur-Vehicle이 튀어오르는 버그 개선.
Ego Ghost Mode로 GV70 이동 시 잘못된 좌표로 이동하는 버그 개선
MoraiGhostCmdController로 제어 시 입력한 값과 다른 POS 좌표에 스폰되는 버그 개선.
2021_Hyundai_GV70 / 2021_Hyundai_GV70_Senseor 두 차종이 대상임.
Multi Ego의 Ego_2가 네트워크 연결이 되지 않는 버그 개선
Multi Ego 세팅 상태에서 Ego_2에 네트워크 [Disconnect] 클릭 후 다시 [Connect] 클릭 시 Ego-2에 네트워크가 연결이 되지 않는 현상 개선.
Multi Ego인 Ego-2 배치 후 Scenario 저장 시 Ego_0 의 Network 상태가 반영되지 않는 버그 개선
Ego-2 배치 후 Scenario 저장 시, Ego_0 의 Network 세팅을 MoraiGhostCmdController로 설정하였음에도 Ctrl_cmd 으로 설정되는 버그 개선.
MoraiCmdController의 default 네트워크가 Apollo로 출력되는 버그 개선
Network Settings에서 MoraiCmdController의 default 네트워크가 ROS/UDP가 아닌 Apollo로 출력되는 버그 개선.
H3 _ 2021.11.25 _ v4.7.211109.H3
시뮬레이터 상 용어 변경
Pedestrian Parameter 변경 항목
Mode
Active → Look Off
Loop → Loop On
Distance
Active Distance → Activation Distance
Move Distance → Travel Distance
Behavior
Normal → Standard
Calling → Calling
LookPhone → Texting
Rotation → Heading
Standard Point → Reference Point
Velocity → Speed로의 변경 적용 항목
Ego
Graph
Driving Info
Driving Info > Cruise Mode
NPC
Graph
Driving Info
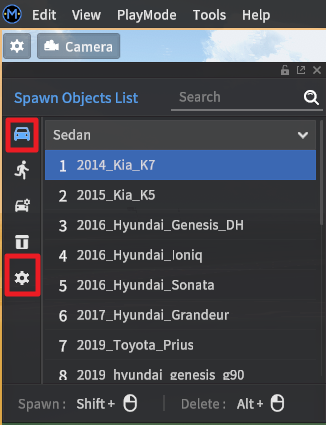
Scenario Edit > Object Setting
Vehicle
Spawn Point
H4 _ 2021.12.23 _ v4.7.211109.H4
Map Update
R_KR_PR_SejongBRT0
인도, 가로등, 펜스, 등 모델 추가 및 퀄리티 업데이트.
V_RHT_Suburb_02 & V_RHT_Suburb_03
일부 차선 및 추가된 건물들의 Ground Truth 맵핑이 안되었던 오류 수정.
차량 초기 세팅 이슈 개선
주행중인 Ego 및 NPC 차량의 시나리오를 저장 후 Load할 때, 저장 시점의 속도를 따라가지 못하는 이슈 개선함.
UDP 통신 Object Info 메세지 사용 이슈 개선
오브젝트 타입 정보 'Ego vehicle=-1' 추가 및 데이터 수신 가능한 Object 개수 최대 9->20개로 수정함
H5 _ 2022.01.13 _ v4.7.211109.H5
Rosbag Replay 사용 이슈 개선
Rosbag 파일 Replay 시 FPS가 현격하게 떨어지는 문제 개선함.
v4.7.211109.H4만 해당함.
UDP 통신 Ego Vehicle Status과 Object Info 프로토콜에 Current Link ID 추가 UDP 설정 방법 및 프로토콜
Current Link ID는 Driving Info에서 확인만 가능하여 데이터 활용을 위해 Ego Vehicle Status과 Object Info 각각의 프로토콜에 Current Link ID 추가함.
H6 _ 2022.01.27 _ v4.7.211109.H6
가상맵에서 GPS 센서 Connect 시 Heading Error 보정에서 오류 발생 이슈 개선
가상맵의 경우 Map이름이 V(Virtual)로 시작함.
H7 _ 2022.02.16 _ v4.7.211109.H7
변경사항 없음