네트워크 설정
MORAI SIM은 UDP와 ROS 프로토콜을 기본 제공한다.
Autoware.AI 또는 Apollo와 같은 복합적인 시스템 설정은 별도 Quick Start Guide 페이지를 참조한다.
네트워크 설정 창 UI 변경 (21.09.07 기점)
기존에는 모든 네트워크가 Ego 차량에 종속적이었으나, 시뮬레이터 자체에만 연결이 필요한 네트워크 환경을 지원하기 위하여, 더불어 네트워크 설정 창의 효율성을 향상하기 위해 Ego Network 탭과 Simulator Network 탭으로 구분했다.
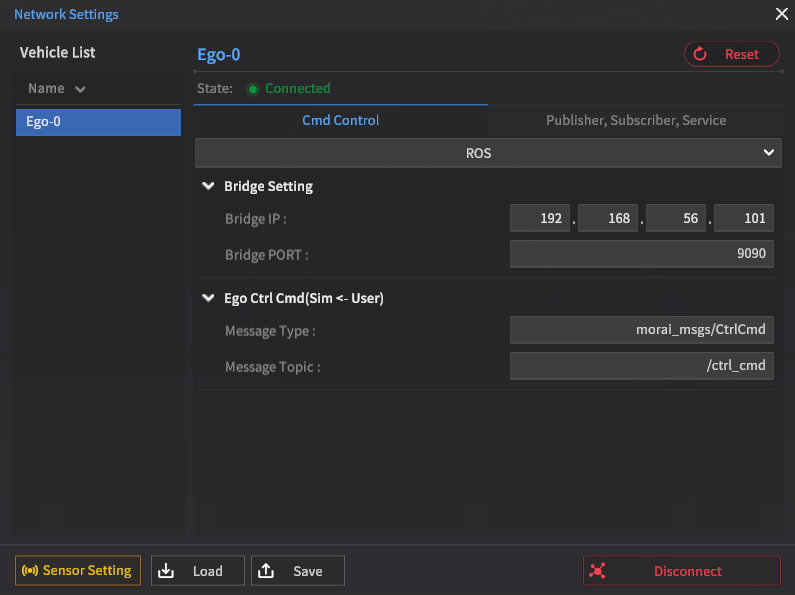
변경 전
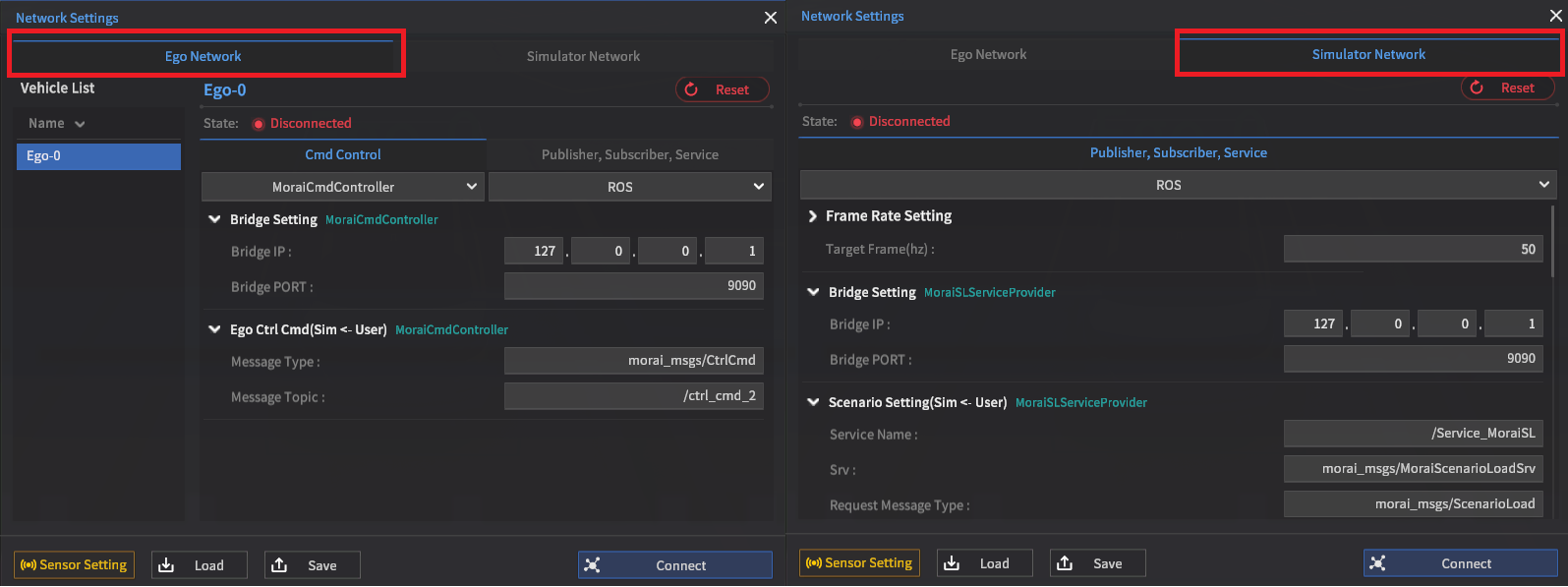
변경 후
Simulator Network 탭으로 옮겨진 항목 목록
ROS
Scenario Setting (Sim<-User)
-MoraiSLServiceProviderSim Proc Handle (Sim<-User)
-MoraiSimProcHandleSubscriberSim Proc Handle (Sim<-User)
-MoraiSimProcServiceProviderSim Proc Status (Sim->User)
-MoraiSimProcStatusPublisherGet TrafficLight Status (Sim<-User)
-MoraiTLServiceProviderVehicle Spec Srv (Sim<-User)
-MoraiVehicleSpecServiceProviderMulti Ego Setting (Sim<-User)
-MultiEgoTransformHandlerVehicle Collision Data (Sim->User)
-VehicleCollisionInfoPublisher
UDP
Multi Ego Setting (Sim<-User)
-MultiEgoTransformHandlerVehicle Collision Data (Sim->User)
-VehicleCollisionInfoPublisher