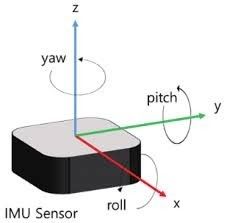
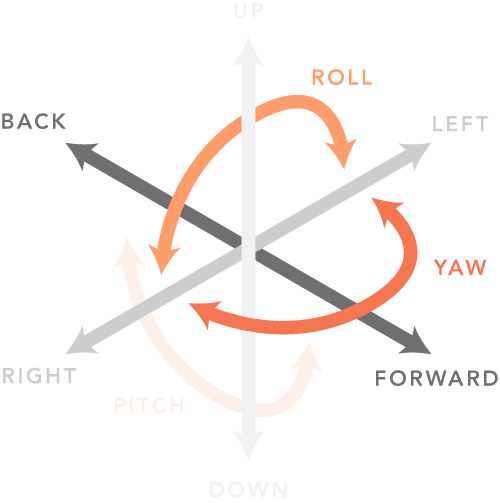
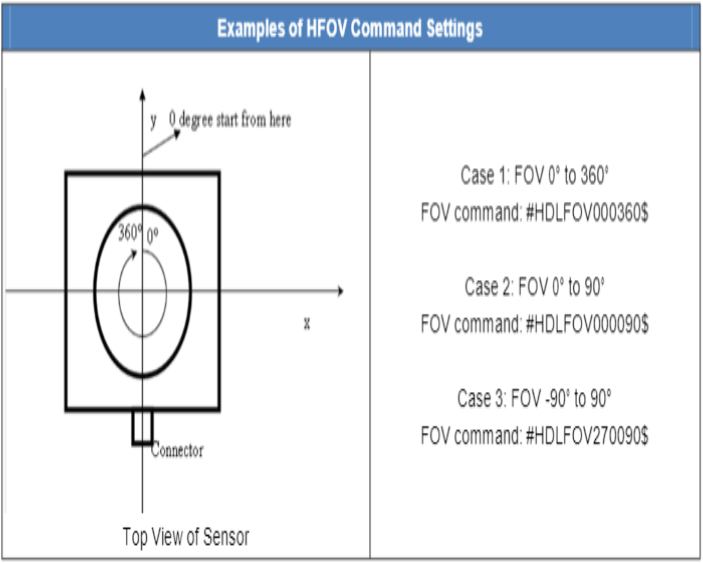
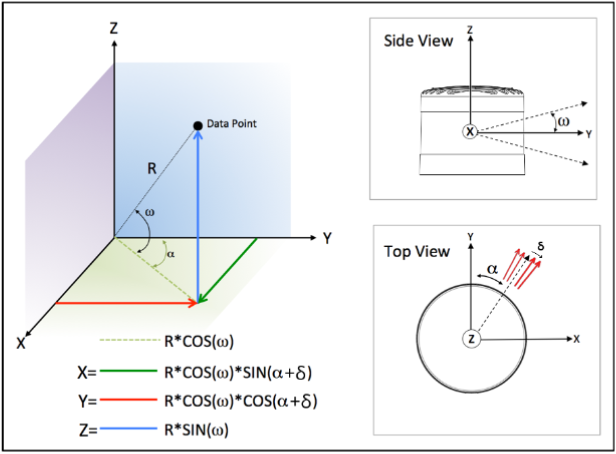
ROS Velodyne_driver 사용 ROS Velodyne_driver를 통해 데이터 출력 시 기존 Velodyne의 좌표계가 아닌 ROS의 기본 좌표계로 표현된다 Velodyne LiDAR 의 좌표는 (forward : y right : x up : z) 에서 (forward : x left : y up : z) 로 나오게 된다.
Simulator 이용한 Veloview 와 ROS Rviz 비교
Simulator 화면
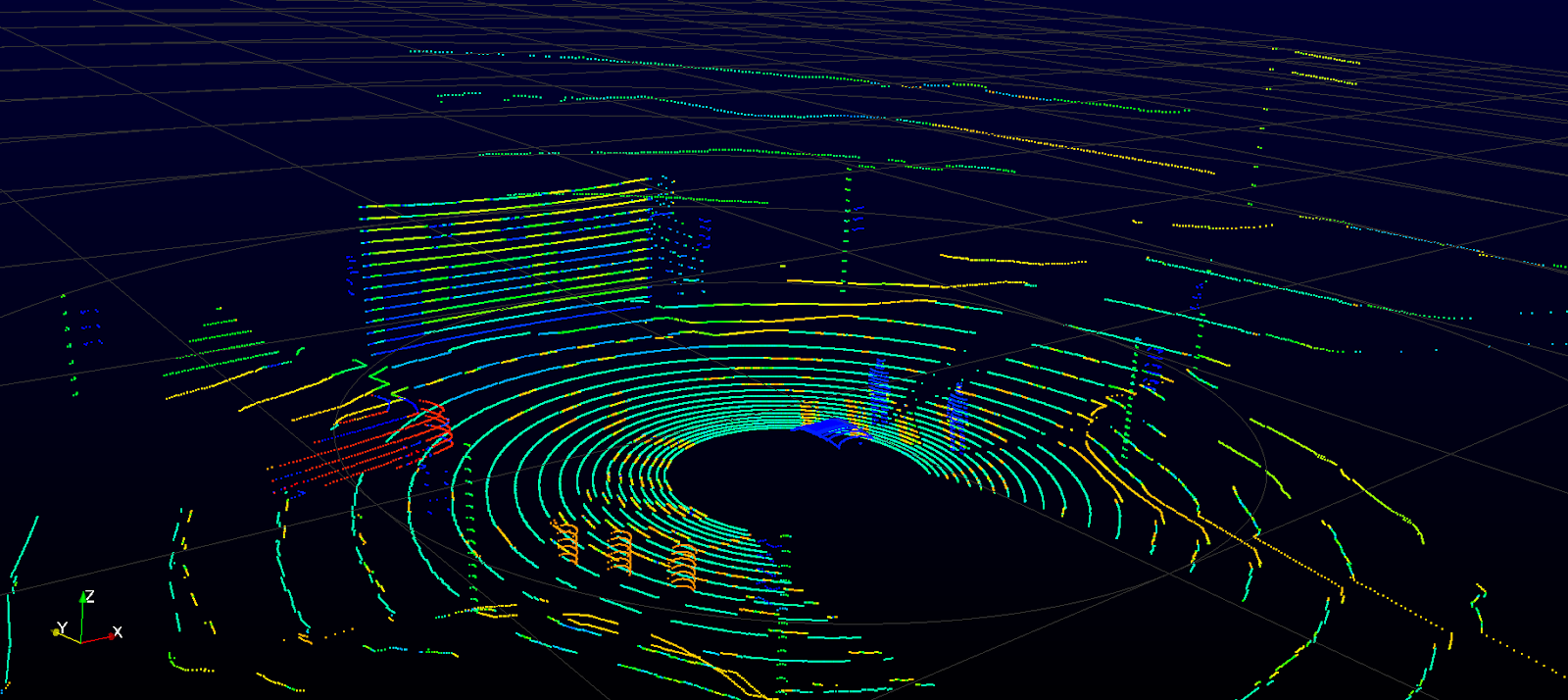
Veloview
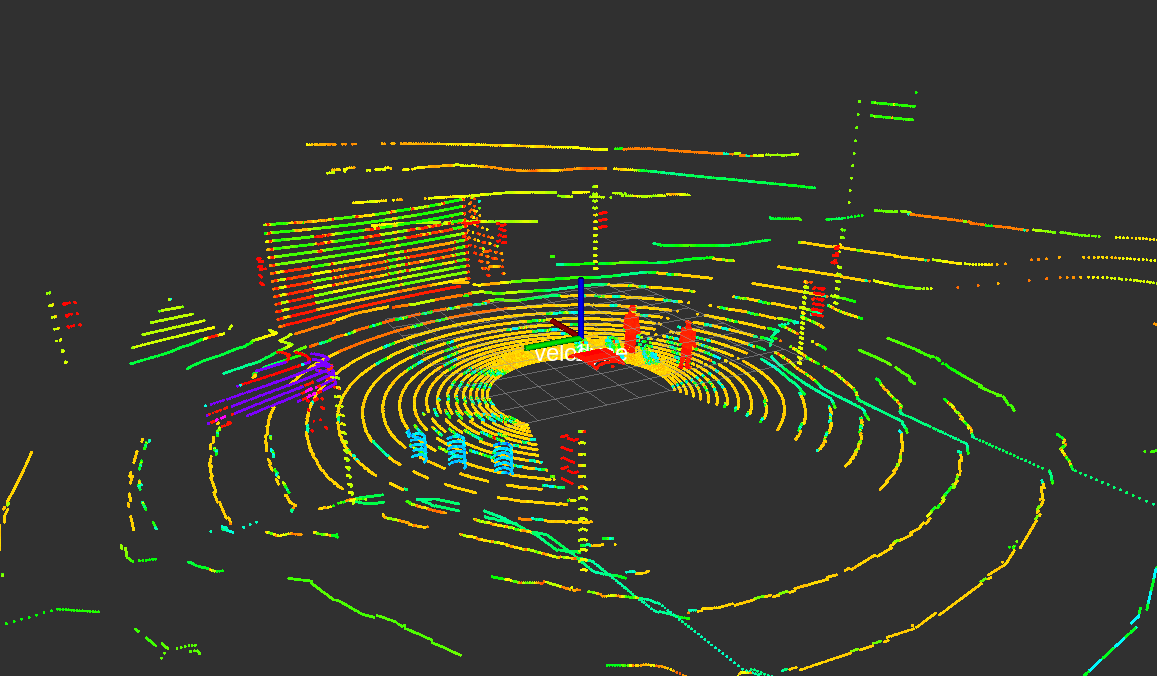
Rviz
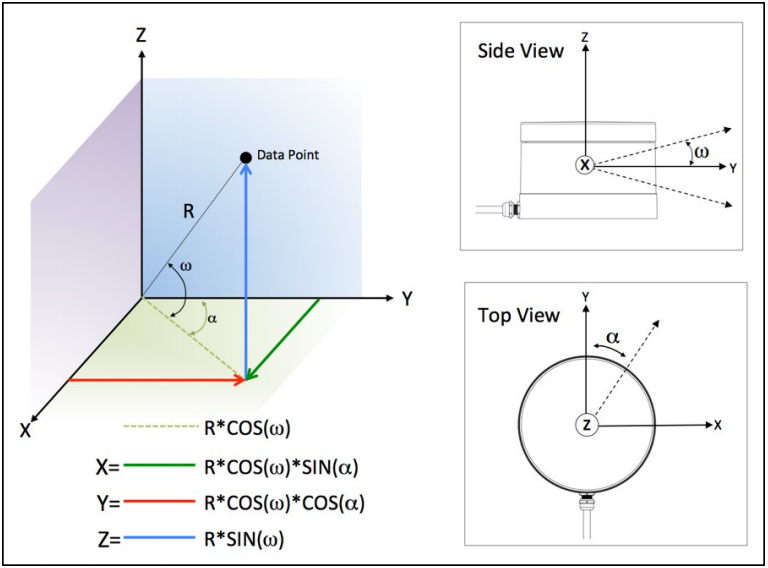
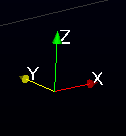
Veloview Axis
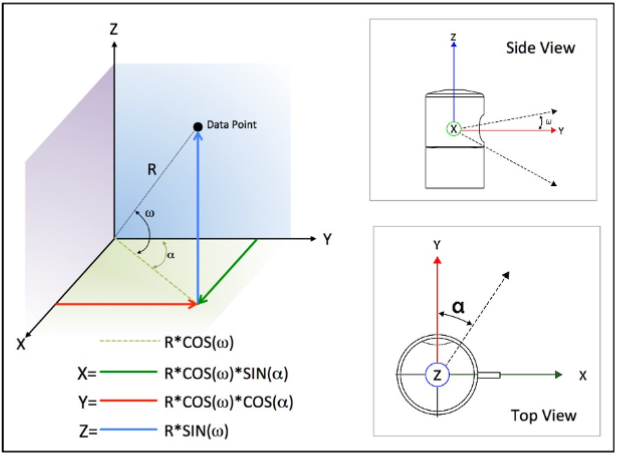
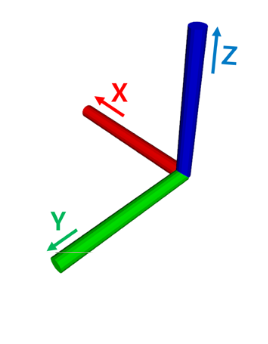
Rviz Axis
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.